Delaunay三角剖分
Delaunay Triangle
Delaunay三角剖分特点:
最小角最大:在不出现奇异性的情况下,Delaunay三角剖分最小角之和均大于任何非 Delaunay剖分所形成三角形最小角之和 ,三角形的最小内角之和最大 ,从而使得划分的三角形不会出现某个内角过小的情况 ,比较有利于有限元的后续计算。
空外接圆:Delaunay三角剖分中任意三角形的外接圆内不包括其他结点。因此 ,在各种二维三角剖分中 ,只有 Delaunay三角剖分才同时满足全局和局部最优。
Delaunay三角剖分优点:
1.最接近:以最近的三点组成三角形,且三角形各边皆不相交。
2.唯一性:不论从何处区域开始构建,最终结果唯一。
3.最优解:任意两个相邻三角形形成的凸四边形的对角线若可以互换,那么两个三角形六个内角中最小的角度不会变大。
4.最规则:若将三角网中的每个三角形的最小角进行升序排列,则Delaunay三角网的排列得到的数值最大。
5.区域性:新增、删除、移动某一个顶点时只会影响临近的三角形。
6.具有凸多边形的外壳:三角网最外层的边界形成一个凸多边形的外壳。
Voronoi图
离散点集P的Delaunay三角剖分和离散点集P的Voronoi图为对偶图的关系。
Delaunay三角形的外心是Voronoi图的顶点。
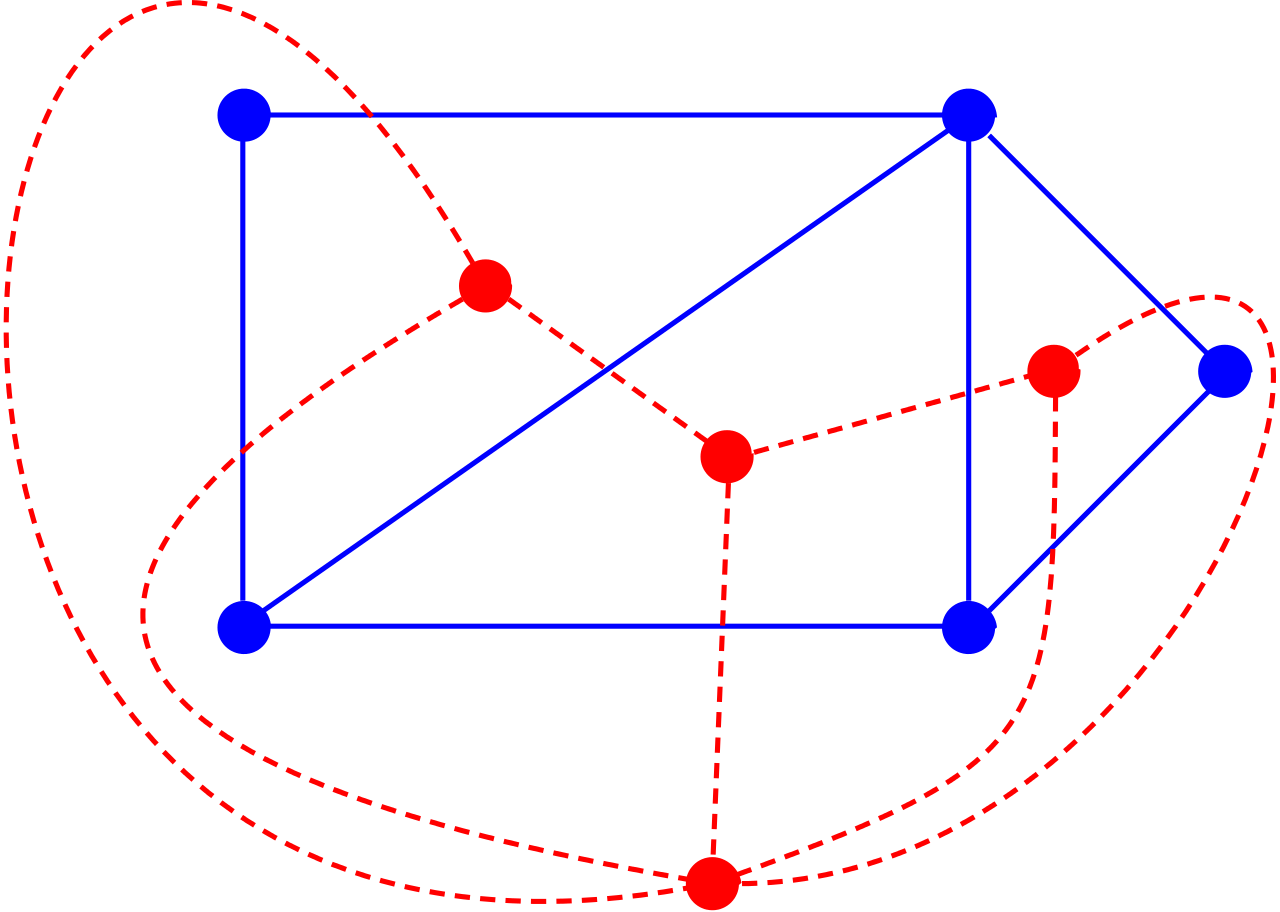
对偶图:设G是平面图,在图G的每个面中指定一个新节点,对两个面公共的边,指定一条新边与其相交。由这些新结点和新边组成的图为G的对偶图。
图中的蓝色虚线的图是红色实线的对偶图:
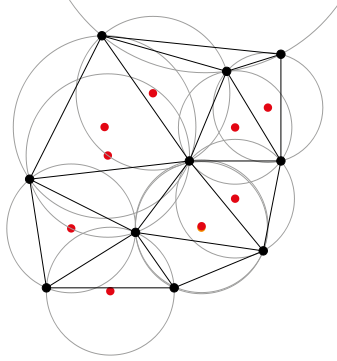
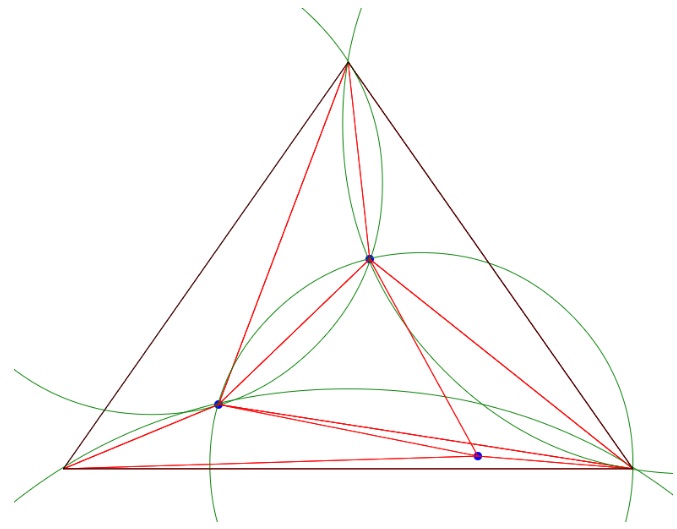
Delaunay三角形和其外接圆与圆心:
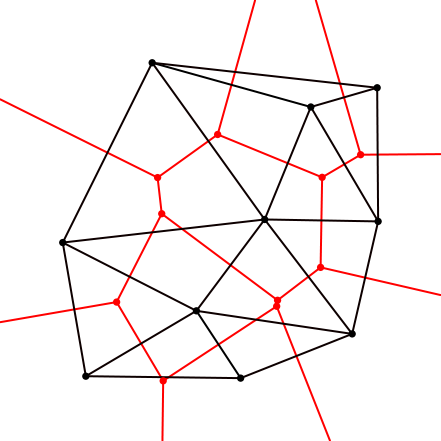
连接外接圆圆心生成Voronoi图:
Delaunay三角剖分算法
Delaunay三角剖分常见算法:翻边算法、分割归并法、逐点插入算法、三角网增长法。本文从常见的逐点插入的Bowyer-Watson算法来理解。
在《Triangulate》里对该方法进行了分析,给出了伪代码:
1 | |
因该算法效率不高,因此有网上给的优化后的伪代码:
1 | |
Bowyer-Watson算法
基本思想:
1.构造一个超级三角形,包含所有的散点,存入三角形链表
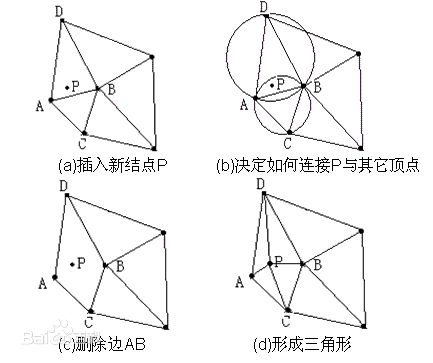
2.将点集中的离散点依次插入,在三角形链表中找出外接圆包含插入点的三角形(称为该点的影响三角形),删除影响三角形的公共边,将插入点同影响三角形的全部顶点连接起来,完成一个点在Delaunay三角形链表中的插入。
3.根据优化准则对局部新形成的三角形优化。将形成的三角形放入Delaunay三角形链表。
4.循环执行步骤2,直到所有离散点插入完毕。
图示:(来自百度百科)
借助三个点理解一遍。
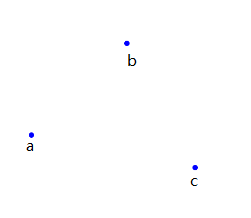
根据离散点的最大分布得到一个随机超级三角形(即该三角形包含了整个离散点集P),并将超级三角形放入temp triangles中
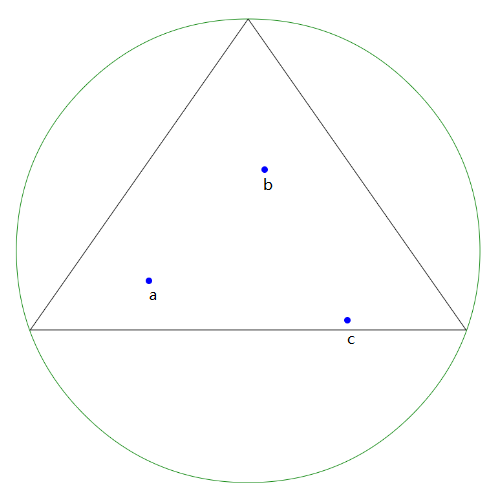
接下来对temp triangle中的三角形遍历画外接圆,这时先对左边第一个点a进行判断,其在圆内所以该三角形不为Delaunay三角形,将其三边保存至edge buffer中,temp triangles中删除该三角形
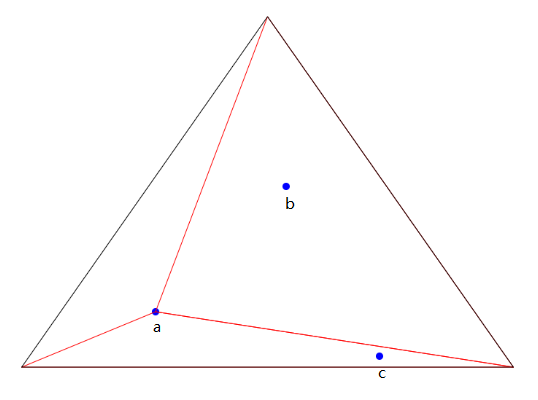
将a点与edge buffer中的每一个边相连,组成三个三角形,存入temp triangles中
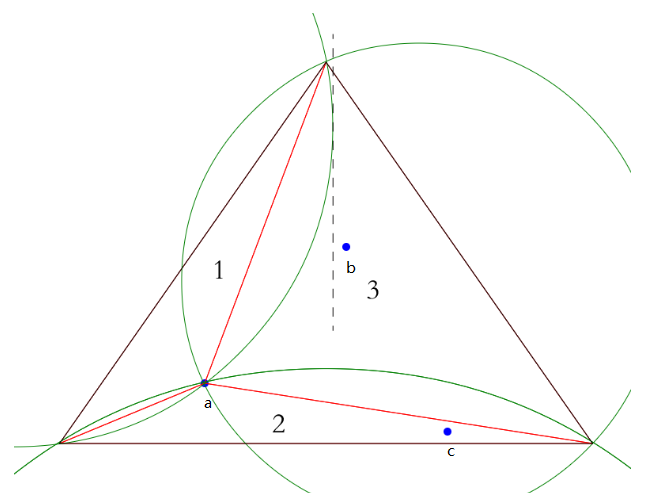
再将重复对temp triangles的遍历并画外接圆,这时使用的是b点来进行判断
- b点在三角形1外接圆右侧,则表示左侧三角形为Delaunay三角形,将该三角形保存至triangles中
- b点在三角形2外接圆外侧,为不确定三角形,跳过(后面处理),但并不在temp triangles中删除
- b点在三角形3外接圆内侧,则这时向清空后的edge buffer加入该三角形的三条边,并用b点与edge buffer中的三角边进行组合,组合成了三个三角形并加入到temp triangles中
这时,temp buffer 中有六条边,triangles中有两个三角形,temp triangles中有1个三角形
对temp buffer中的六条边进行去重,得到五条边,将该点与这五条边组合成五个三角形并加入到temp triangles 中,这时temp triangles中有6个三角形
由于三个点已经遍历结束,到了不会再对第三个点形成的三角形做外接圆,这时则将triangles与temp triangles合并,合并后的数组表示包含已经确定的Delaunay三角形和剩下的三角形
这时除去合并后数组中的和超级三角形三个点有关的所有三角形,即进行数组坐标的限定,则得到了最后的结果:
Code
References
http://www.cs.cmu.edu/~quake/triangle.html
https://people.sc.fsu.edu/~jburkardt/c_src/triangle/triangle.html
https://www.cnblogs.com/zhiyishou/p/4430017.html
https://en.wikipedia.org/wiki/Delaunay_triangulation
http://local.wasp.uwa.edu.au/~pbourke/papers/triangulate/index.html
http://local.wasp.uwa.edu.au/~pbourke/papers/triangulate/cpp.zip
https://github.com/obviousjim/ofxDelaunay
https://github.com/delfrrr/delaunator-cpp/blob/master/include/delaunator.hpp
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!