自动微分法
几种微分求解的方法
- 手动求解法(Manual Differentiation)
- 数值微分法(Numerical Differentiation)
- 符号微分法(Symbolic Differentiation)
- 自动微分法(Automatic Differentiation)
自动微分
在数学和计算代数领域,automatic differentiation (AD)又称为 algorithmic differentiation 或者 computational differentiation。AD是一个可以对程序代码表示的数学函数进行自动微分的技术。AD利用链式法则来达到自动求解的目录,AD有两种主要的方法:
- 代码转换(source-code transformation)(R. Giering and T. Kaminski. 1998):
- 利用一个代码转换编译器,这个编译器会分析源代码,然后产生一个和源代码对应的伴随模式(adjoint model)程序,编译时的代码生成(如用 flex-bison 做词法、语法分析);
- 优点是静态生成效率高(原始算法的3~4倍) ;
- 一次生成,多次使用,缺点是学习门槛较高(编译原理…);
- 很多比较好的工具非免费;
- 对现代编程语言特性的限制(如C++类、模板等);
- 运算符重载(operator overloading)
- 应用比较广泛,很多编程语言特性可以很好的工作;
- 优点是简单直接,缺点是动态生成成本较高(代表性的工具效率是原始算法的10~35倍)。
- 较多免费开源 C++ 工具 (e.g. ADOL-C, CppAD, Sacado);
AD 这两种实现方式:运算符重载与代码生成,两种方式的原理都一样, 链式法则。AD相关工具,请到这个http://www.autodiff.org/ 页面。自动微分(AD)是计算导数的最优方法,比符号计算、有限微分更快更精确,AD已经广泛应用在优化领域,包括人工神经网络的训练算法 back-propagation(BP)等。
AD基本原理
链式法则
AD基本原理是链式法则。链式法则又分为正向和反向。如下例子
$$y=f(g(h(x)))=f(g(h(w_0)))=f(g(w_1))=f(w_2)=w_3$$
那么链式法则就表示为:
$$\frac{dy}{dx}=\frac{dy}{dw_2}\frac{dw_2}{dw_1}\frac{dw_1}{dx}$$
正向链式法则:则从链里往外算(即,先算$\frac{dw_1}{dx}$,再算$\frac{dw_2}{dw_1}$,最后算$\frac{dy}{dw_2}$)。
反向链式法则:则从链外往外里(即,先算$\frac{dy}{dw_2}$,再算$\frac{dw_2}{dw_1}$,最后算$\frac{dw_1}{dx}$)。
简洁的表示为:
正向链式法则:计算递归式$$\frac{dw_i}{dx}=\frac{dw_i}{dw_{i-1}}\frac{dw_{i-1}}{dx},且w_3=y$$
反向链式法则:计算递归式$$\frac{dy}{dw_i}=\frac{dy}{dw_{i+1}}\frac{dw_{i+1}}{dw_i},且w_0=y$$
通常,正向跟反向链式法则都是通过计算图来表示和计算,这样更加的方便。
正向链式法则计算图
将函数转化为一个DAG(有向无环图),就能很容易的求解每一步的值。
例1:
假设有计算式子:$y=x_0*x_1+x_1$ (1),我们要求解$\frac{\partial y}{\partial x_1}$。
首先,其计算图表示为:
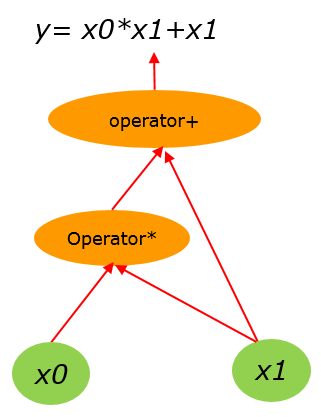
把(1)式展开为链式计算序列为:
1 | |
那么其对应的计算图则为:
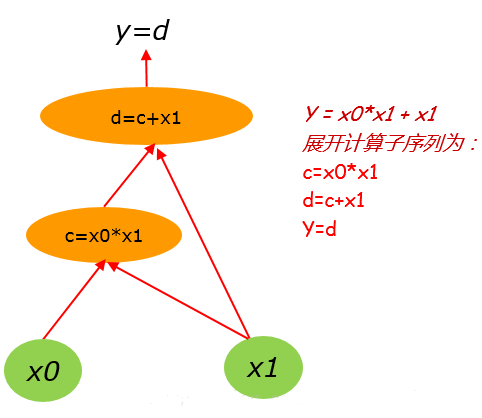
这里假设$x_0,x_1$的初值分别为:1, 2。 (1)式展开计算子序列为:
1 | |
那么其对应计算图为:
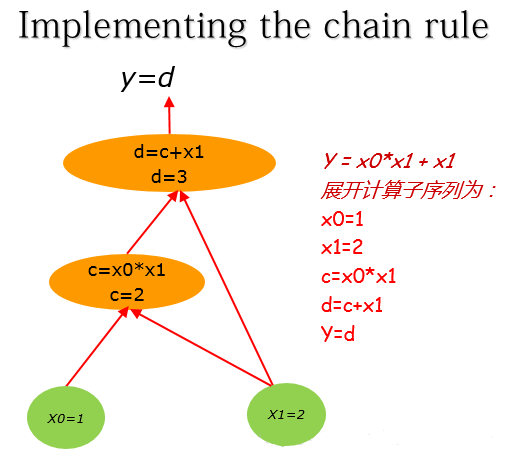
然后对该计算图求解偏导数:

由链式法则得到:$$\frac{\partial y}{\partial x_1}=\frac{\partial y}{\partial d}\frac{\partial d}{\partial c}\frac{\partial c}{\partial x_1}+\frac{\partial y}{\partial d}\frac{\partial d}{\partial x_1}$$
结合计算图中对应的值可知:$\frac{\partial y}{\partial x_1}=1\times1\times1+1\times1=2$
例2:
对于下列函数:$$f(x_1,x_2)=ln(x_1)+x_1*x_2-sin(x_2)$$
转化为计算图:
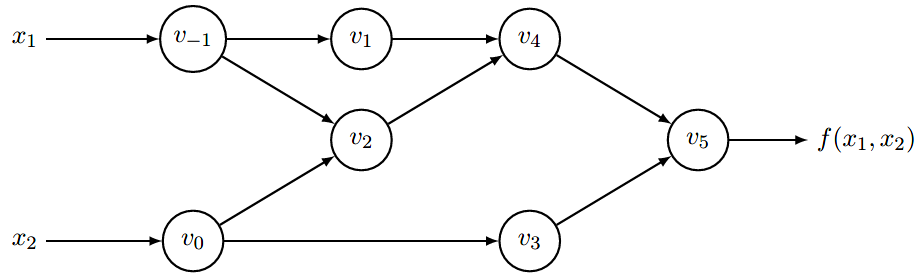
那么求每一步的导数值就可以表示为:
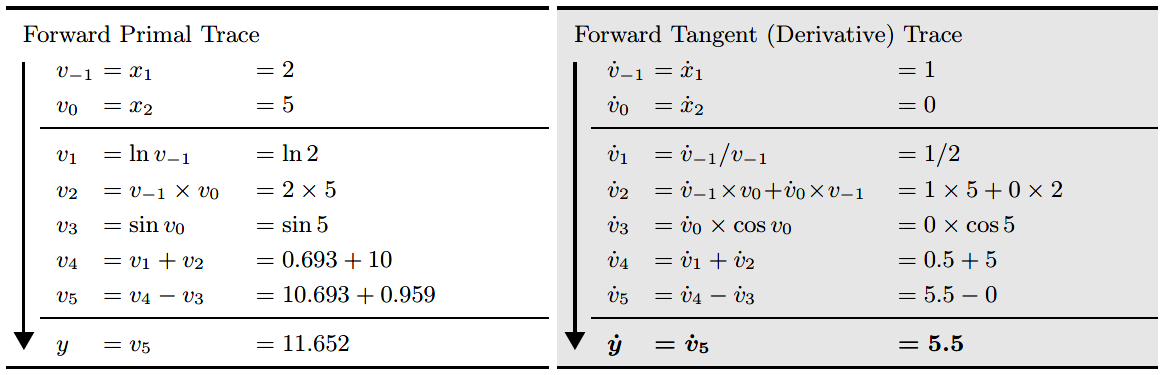
上表,左半部分是从左往右计算图每个节点的求值结果,右半部分是每个节点对于$x_1$的求导结果,比如$\dot{v_1}=\frac{dv}{dx_1}$,注意到每一步的求导都会利用到上一步的求导结果。
对于自动微分的正向模式,如果函数输入输出为:$R \rightarrow R^m $
那么正向模式只需要计算一次上表右侧过程即可,非常高效。但是对于输入输出映射为:$R^n\rightarrow R^m$,这样一个有$n$个输入的函数,对于函数的梯度求解则需要处理$n$遍上述过程。而且再实际算法模型中,通常输入输出是极度不成比例的,也就是$n>>m$,那么利用正向模式进行自动微分的效率就太低了,因此有了反向模式的出现。
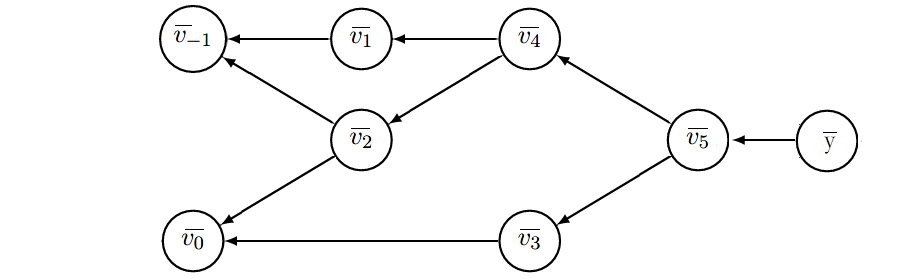
反向链式法则计算图
自动微分的反向模式其实就是一种通用的BackPropagation(反向传播算法),即backpropagation是自动微分反向模式的一种特殊形式。
反向模式从最终结果开始求导,利用最终输出对每一个节点进行求导,其过程如下计算图所示:
其具体计算过程如下表所示:
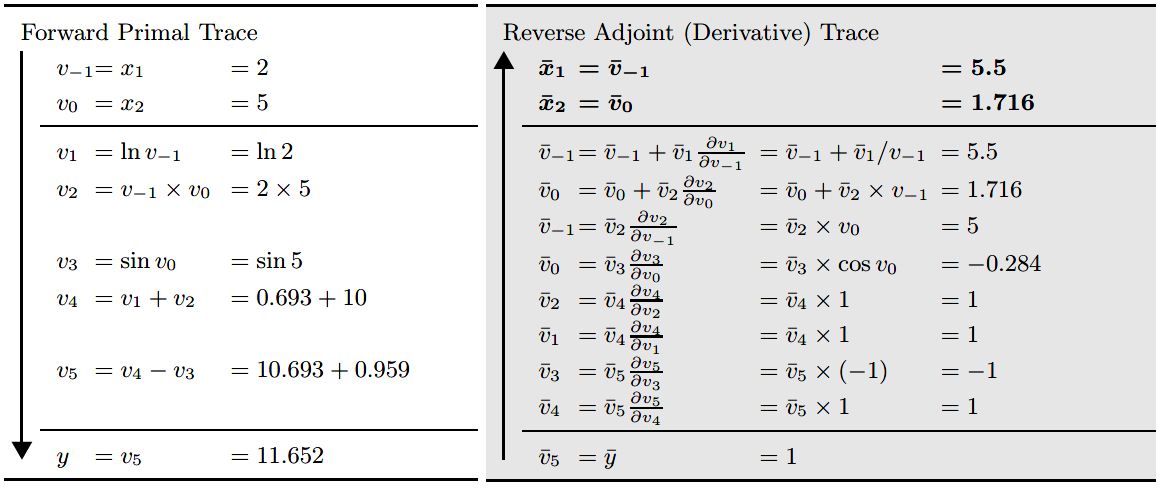
上表左边和之前的正向模式一致,用于求解函数值,右边则是反向模式的计算过程,须从下向上看,也就是一开始先计算输出$y$对于节点$v_5$的导数,用$\bar{v_5}=\frac{dy}{dv_5}$,这样的记号可以强调我们对当前计算结果进行缓存,以便用于后续计算,而不必重复计算。再由链式法则我们可以计算输出节点对于图种每个节点的导数。
比如对节点$v_3$:
$$\frac{y}{v_3}=\frac{dy}{dv_5}\frac{dv_5}{dv_3}$$
用$\bar{v_i}=\frac{dy}{dv_i}$记法,则有:
$$\frac{y}{v_3}=\bar{v_5}\frac{dv_5}{dv_3}$$
比如对于节点$v_0$:
$$\frac{y}{v_0}=\frac{dy}{dv_2}\frac{dv_2}{dv_0}+\frac{dy}{dv_3}\frac{dv_3}{dv_0}$$
用$\bar{v_i}=\frac{dy}{dv_i}$记法,则有:
$$\frac{y}{v_0}=\bar{v_2}\frac{dv_2}{dv_0}+\bar{v_3}\frac{dv_3}{dv_0}$$
和backpropagation算法一样,我们必须记住前向时当前节点发出的边,然后在反向传播时,可以搜集所有受到当前节点影响的节点。
如上的计算过程,对于像神经网络这种模型,输入通常是上万到上百万维,而输出损失函数是1维的模型,则只需要一遍反向模式计算过程,便可以求出输出对于各个输入的导数,从而轻松求取梯度用于后续优化更新。
参考
AD:
- Automatic differentiation in machine learning: a survey
- Fast Reverse-Mode Automatic Differentiation using Expression
- https://www.zhihu.com/question/48356514
- https://blog.csdn.net/daniel_ustc/article/details/77133329
- https://en.wikipedia.org/wiki/Automatic_differentiation
- https://github.com/autodiff/autodiff
- https://www.jianshu.com/p/4c2032c685dc
- http://www.autodiff.org/
- https://blog.csdn.net/u013527419/article/details/70184690
- https://github.com/zakheav/automatic-differentiation-framework
- https://blog.csdn.net/daniel_ustc/article/details/77133329
- https://blog.csdn.net/aws3217150/article/details/70214422
BP:
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!